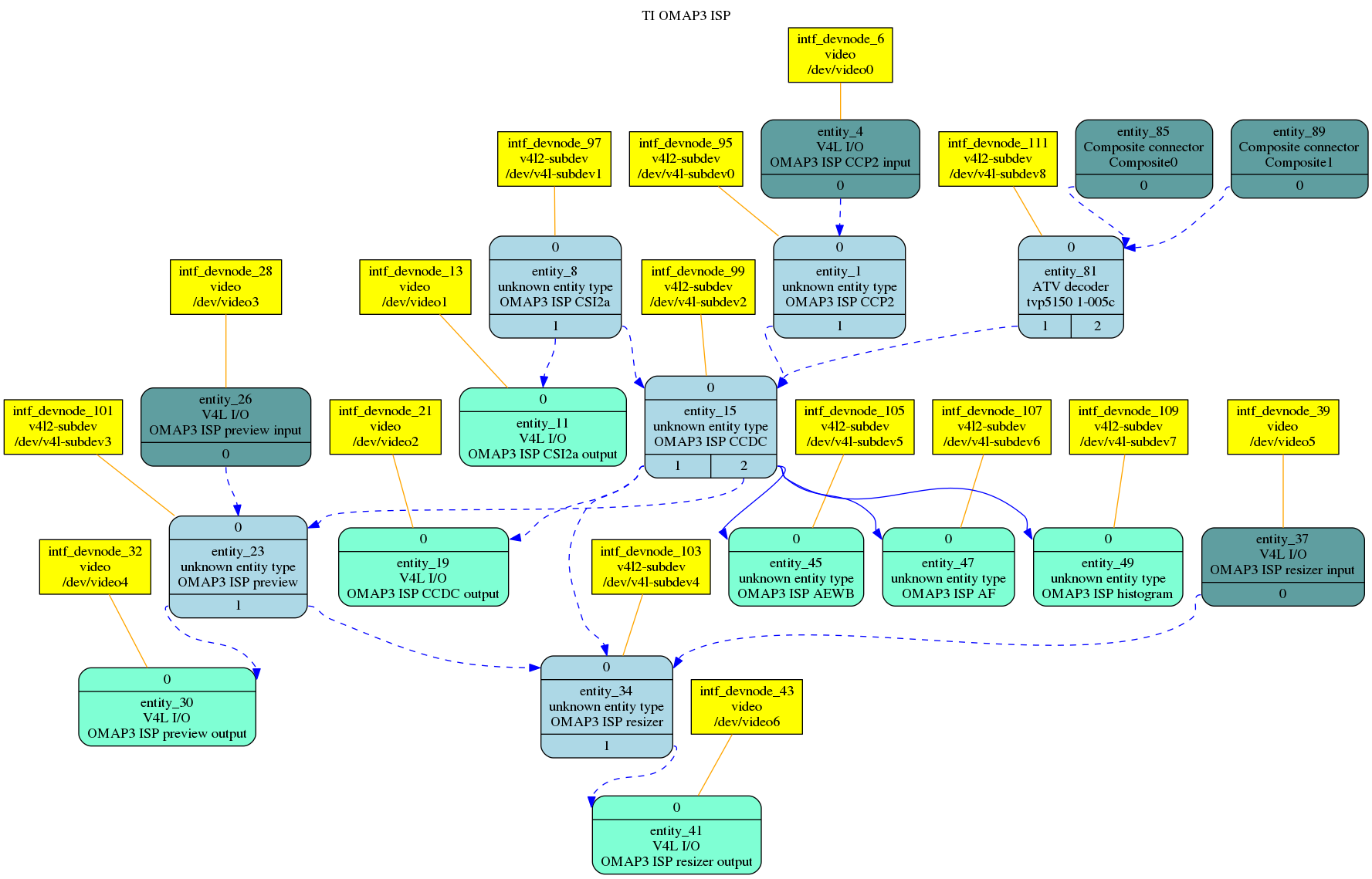
[adding Wim Taymans and Mario Limonciello to CC who said that they may also join via Hangous] On Wed, Jun 6, 2018 at 6:19 AM, Tomasz Figa <tfiga@xxxxxxxxxxxx> wrote: > On Mon, Jun 4, 2018 at 10:33 PM Mauro Carvalho Chehab > <mchehab+samsung@xxxxxxxxxx> wrote: >> >> Hi all, >> >> I consolidated hopefully all comments I receive on the past announcement >> with regards to the complex camera workshop we're planning to happen in >> Tokyo, just before the Open Source Summit in Japan. >> >> The main focus of the workshop is to allow supporting devices with MC-based >> hardware connected to a camera. >> >> I'm enclosing a detailed description of the problem, in order to >> allow the interested parties to be at the same page. >> >> We need to work towards an agenda for the meeting. >> >> From my side, I think we should have at least the following topics at >> the agenda: >> >> - a quick review about what's currently at libv4l2; >> - a presentation about PipeWire solution; Wim mentioned that he could do this. >> - a discussion with the requirements for the new solution; >> - a discussion about how we'll address - who will do what. > > I believe Intel's Jian Xu would be able to give us some brief > introduction to IPU3 hardware architecture and possibly also upcoming > hardware generations as well. > > My experience with existing generations of ISPs from other vendors is > that the main principles of operation are very similar to the model > represented by IPU3 and very much different to the OMAP3 example > mentioned by Mauro below. I further commented on it below. > >> >> Comments? Suggestions? >> >> Are there anyone else planning to either be there physically or via >> Google Hangouts? >> >> Tomaz, >> >> Do you have any limit about the number of people that could join us >> via Google Hangouts? >> > > Technically, Hangouts should be able to work with really huge > multi-party conferences. There is obviously some limitation on client > side, since thumbnails of participants need to be decoded at real > time, so even if the resolution is low, if the client is very slow, > there might be some really bad frame drop happening on client side. > > However, I often have meetings with around 8 parties and it tends to > work fine. We can also disable video of all participants, who don't > need to present anything at the moment and the problem would go away > completely. > >> >> Regards, >> Mauro >> >> --- >> >> 1. Introduction >> =============== >> >> 1.1 V4L2 Kernel aspects >> ----------------------- >> >> The media subsystem supports two types of devices: >> >> - "traditional" media hardware, supported via V4L2 API. On such hardware, >> opening a single device node (usually /dev/video0) is enough to control >> the entire device. We call it as devnode-based devices. >> An application sometimes may need to use multiple video nodes with >> devnode-based drivers to capture multiple streams in parallel >> (when the hardware allows it of course). That's quite common for >> Analog TV devices, where both /dev/video0 and /dev/vbi0 are opened >> at the same time. >> >> - Media-controller based devices. On those devices, there are typically >> several /dev/video? nodes and several /dev/v4l2-subdev? nodes, plus >> a media controller device node (usually /dev/media0). >> We call it as mc-based devices. Controlling the hardware require >> opening the media device (/dev/media0), setup the pipeline and adjust >> the sub-devices via /dev/v4l2-subdev?. Only streaming is controlled >> by /dev/video?. >> >> In other words, both configuration and streaming go through the video >> device node on devnode-based drivers, while video device nodes are used >> used for streaming on mc-based drivers. >> >> With devnode-based drivers, "standard" media applications, including open >> source ones (Camorama, Cheese, Xawtv, Firefox, Chromium, ...) and closed >> source ones (Skype, Chrome, ...) support devnode-based devices[1]. Also, >> when just one media device is connected, the streaming/control device >> is typically /dev/video0. >> >> [1] It should be noticed that closed-source applications tend to have >> various bugs that prevent them from working properly on many devnode-based >> devices. Due to that, some additional blocks were requred at libv4l to >> support some of them. Skype is a good example, as we had to include a >> software scaler in libv4l to make it happy. So in practice not everything >> works smoothly with closed-source applications with devnode-based drivers. >> A few such adjustments were also made on some drivers and/or libv4l, in >> order to fulfill some open-source app requirements. >> >> Support for mc-based devices currently require an specialized application >> in order to prepare the device for its usage (setup pipelines, adjust >> hardware controls, etc). Once pipeline is set, the streaming goes via >> /dev/video?, although usually some /dev/v4l2-subdev? devnodes should also >> be opened, in order to implement algorithms designed to make video quality >> reasonable. > > To further complicate the problem, on many modern imaging subsystems > (Intel IPU3, Rockchip RKISP1), there is more than 1 video output > (CAPTURE device), for example: > 1) full resolution capture stream and > 2) downscaled preview stream. > > Moreover, many ISPs also produce per-frame metadata (statistics) for > 3A algorithms, which then produces per-frame metadata (parameters) for > processing of next frame. These would be also exposed as /dev/video? > nodes with respective V4L2_BUF_TYPE_META_* queues. > > It is complicated even more on systems with separate input (e.g. CSI2) > and processing (ISP) hardware, such as Intel IPU3. In such case, the > raw frames captured from the CSI2 interface directly are not usable > for end-user applications. This means that some component in userspace > needs to forward the raw frames to the ISP and only the output of the > ISP can be passed to the application. > >> On such devices, it is not uncommon that the device used by the >> application to be a random number (on OMAP3 driver, typically, is either >> /dev/video4 or /dev/video6). >> >> One example of such hardware is at the OMAP3-based hardware: >> >> http://www.infradead.org/~mchehab/mc-next-gen/omap3-igepv2-with-tvp5150.png >> >> On the picture, there's a graph with the hardware blocks in blue/dark/blue >> and the corresponding devnode interfaces in yellow. >> >> The mc-based approach was taken when support for Nokia N9/N900 cameras >> was added (with has OMAP3 SoC). It is required because the camera hardware >> on SoC comes with a media processor (ISP), with does a lot more than just >> capturing, allowing complex algorithms to enhance image quality in runtime. >> Those algorithms are known as 3A - an acronym for 3 other acronyms: >> >> - AE (Auto Exposure); >> - AF (Auto Focus); >> - AWB (Auto White Balance). >> >> The main reason that drove the MC design is that the 3A algorithms (that is >> the 3A control loop, and sometimes part of the image processing itself) often >> need to run, at least partially, on the CPU. As a kernel-space implementation >> wasn't possible, we needed a lower-level UAPI. >> >> Setting a camera with such ISPs are harder because the pipelines to be >> set actually depends the requirements for those 3A algorithms to run. >> Also, usually, the 3A algorithms use some chipset-specific userspace API, >> that exports some image properties, calculated by the ISP, to speed up >> the convergence of those algorithms. >> >> Btw, usually, the 3A algorithms are IP-protected, provided by vendors >> as binary only blobs, although there are a few OSS implementations. >> >> Part of the problem is that, so far, there isn't a proper userspace API >> to implement 3A libraries. Once we have an userspace camera stack, we >> hope that we'll gradually increase the number and quality of open-source >> 3A stacks. >> > [snip] >> >> 2.2 Modern hardware is starting to come with "complex" camera ISP >> ----------------------------------------------------------------- >> >> While mc-based devices were limited to SoC, it was easy to >> "delegate" the task of talking with the hardware to the >> embedded hardware designers. >> >> However, this is changing. Dell Latitude 5285 laptop is a standard >> PC with an i3-core, i5-core or i7-core CPU, with comes with the >> Intel IMU3 ISP hardware[2]. > > IPU3 :) > >> >> [2] https://www.spinics.net/lists/linux-usb/msg167478.html >> >> There, instead of an USB camera, the hardware is equipped with a >> MC-based ISP, connected to its camera. Currently, despite having >> a Kernel driver for it, the camera doesn't work with any >> userspace application. >> >> I'm also aware of other projects that are considering the usage of >> mc-based devices for non-dedicated hardware. >> > [snip] >> >> 3.2 libv4l2 support for 3A algorithms >> ===================================== >> >> The 3A algorithm handing is highly dependent on the hardware. The >> idea here is to allow libv4l to have a set of 3A algorithms that >> will be specific to certain mc-based hardware. >> >> One requirement, if we want vendor stacks to use our solution, is that >> it should allow allow external closed-source algorithms to run as well. >> >> The 3A library API must be standardized, to allow the closed-source >> vendor implementation to be replaced by an open-source implementation >> should someone have the time and energy (and qualifications) to write >> one. >> >> Sandboxed execution of the 3A library must be possible as closed-source >> can't always be blindly trusted. This includes the ability to wrap the >> library in a daemon should the platform's multimedia stack wishes >> and to avoid any direct access to the kernel devices by the 3A library >> itself (all accesses should be marshaled by the camera stack). >> >> Please note that this daemon is *not* a camera daemon that would >> communicates with the V4L2 driver through a custom back channel. >> >> The decision to run the 3A library in a sandboxed process or to call >> it directly from the camera stack should be left to the camera stack >> and to the platform integrator, and should not be visible by the 3A >> library. >> >> The 3A library must be usable on major Linux-based camera stacks (the >> Android and Chrome OS camera HALs are certainly important targets, >> more can be added) unmodified, which will allow usage of the vendor >> binary provided for Chrome OS or Android on regular Linux systems. > > This is quite an interesting idea and it would be really useful if it > could be done. I'm kind of worried, though, about Android in > particular, since the execution environment in Android differs > significantly from a regular Linux distributions (including Chrome OS, > which is not so far from such), namely: > - different libc (bionic) and dynamic linker - I guess this could be > solved by static linking? > - dedicated toolchains - perhaps not much of a problem if the per-arch > ABI is the same? > >> >> It would make sense to design a modular camera stack, and try to make >> most components as platform-independent as possible. This should include: >> >> - the kernel drivers (V4L2-compliant and usable without any closed-source >> userspace component); >> - the 3A library >> - any other component that could be shared (for instance a possible >> request API library). >> >> The rest of the code will mostly be glue around those components to >> integrate them in a particular camera stack, and should be as >> platform-agnostic as possible. >> >> In the case of the Android camera HAL, ideally it would be a glue that >> could be used with different camera vendors (probably with some kind of >> vendor-specific configuration, or possibly with a separate vendor-specific >> component to handle pipeline configuration). >> >> 4 Complex camera workshop >> ========================= >> >> The workshop will be happening in Tokyo, Japan, at Jun, 19, at the >> google offices. The location is: >> >> 〒106-6126 Tokyo, Minato, Roppongi, 6 Chome−10−1 Roppongi Hills Mori Tower 44F > > Nearest station exits: > - Hibiya line Roppongi station exit 1c (recommended) > - Oedo line Roppongi station exit 3 (and few minutes walk) > >> >> 4.1 Physical Attendees >> ====================== >> >> Tomasz Figa <tfiga@xxxxxxxxxx> >> Mauro Carvalho Chehab <Mauro Carvalho Chehab <mchehab+samsung@xxxxxxxxxx> >> Kieran Bingham <kieran.bingham@xxxxxxxxxxxxxxxx> >> Laurent Pinchart <laurent.pinchart@xxxxxxxxxxxxxxxx> >> Niklas Söderlund <niklas.soderlund@xxxxxxxxxxxx> >> Zheng, Jian Xu Zheng <jian.xu.zheng@xxxxxxxxx> >> >> Anywone else? > > Looking at latest reply in this thread: > > jacopo mondi <jacopo@xxxxxxxxxx> > > Anyone else, please tell me beforehand (at least 1-2 days before), as > I need to take care of building access, since it's a multi-tenant > office building. I'll contact each attendee separately with further > details by email. > >> >> 4.2. Attendees Via Google Hangouts >> ================================== >> >> Hans Verkuil <hverkuil@xxxxxxxxx> - Via Google Hangouts - maybe only on afternoon >> Javier Martinez Canillas <javier@xxxxxxxxxxxx> - Via Google Hangouts - only on reasonable TZ-compatible-hours > > What time zone would that be? I guess we could try to tweak the agenda > to take this into account. > Wim, Nicolas and myself are in CEST (UTC +2). The best time for Wim to do the PipeWire presentation would be 10:30 am CEST. Best regards, Javier
{kind=link}
